12.21.2012
Coming Soon To a Theater Near You
Thanks to the industriousness of Nik, we finished our mid-season video for out robot. While we could describe it here, we think the video should speak for itself...
12.18.2012
Shoot to Thrill
Now that our first match is over and gone, we're shifting our focus away from our robot and onto our Mid-season video, a three minute video that documents our achievements with our robot as well as the unity and charity of our team. We have many areas to cover - Design, Strategy, Fundraising, etc. - which must now be focused and condensed. Our plan for the video is for each part to be a channel on a television, though the hard part is to film.
12.17.2012
How The Western Was Won
To put it mildly,



Last Saturday was our first official First competition at Western High School, and as you can see, it was a great day for our team and our robot. We competed in 6 matches throughout the day and came out on top in all of them, to no lack of challenge from the opposing alliances. One matches opponent would be the next matches partner, so in the end we made many new friends and shared many ideas about strengths, weaknesses, and ways to improve. The competition also put Sonic into the firing line for the first time, and while he accomplished his goal, we discovered many flaws in the heat of battle that we can now improve before our next match, such as dropping rings and missing autonomous scores. By earning first place, we hope this match will be the trend for the remaining season, not only in our teams performance but in our enjoyment of the event and the friends we made there.
12.12.2012
It's the Final Countdown!

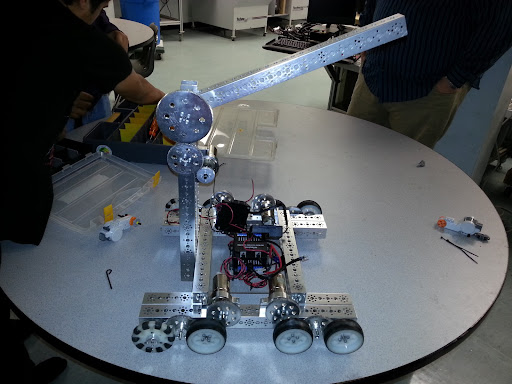
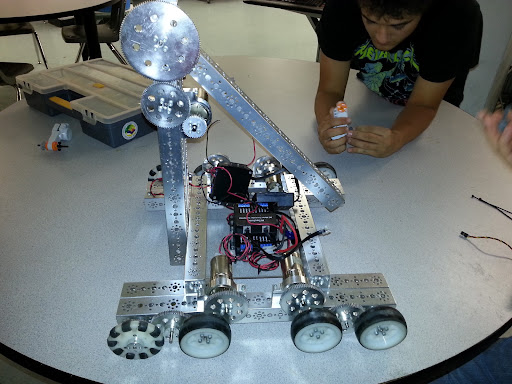
Sonic is nearing completion, just in time for the start of round one this Saturday. There are only a few things more left to do; practice, double-check structural integrity, debug autonomous code, and include sponsors. For the most part though every thing is complete, so without further ado, Ladies and Gentlemen, I present to you, Sonic.

Reaching out
Today, we were visited by FAU and helped them with their robot. Casey helped them out with their programming and ensured the robot was running properly, while the rest of us shared knowledge and helped to improve each others designs. At the end of the day we even had a mock tournament with Sonic vs. their robot


Brains ... and a battery mount

It's always the small ones ...
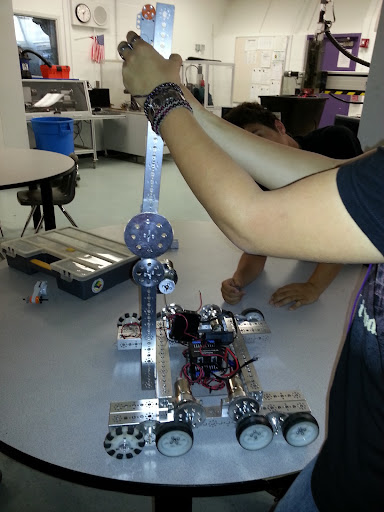
The lift system was very effective, but we noticed that we would have a problem with the arm jerking when we tried to extend it from neutral position. Upon closer inspection of the arm we found this:
 This small piece of plastic, not even an inch in length or half an inch in width, was the root of all evil ... at least for our arm anyways. A simple removal of this piece has resulted in optimal performance of the arm and less strain on our lift system.
This small piece of plastic, not even an inch in length or half an inch in width, was the root of all evil ... at least for our arm anyways. A simple removal of this piece has resulted in optimal performance of the arm and less strain on our lift system.

12.10.2012
Shields Up!
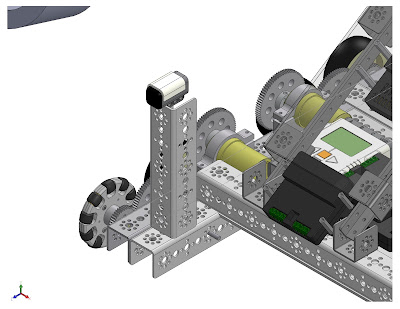
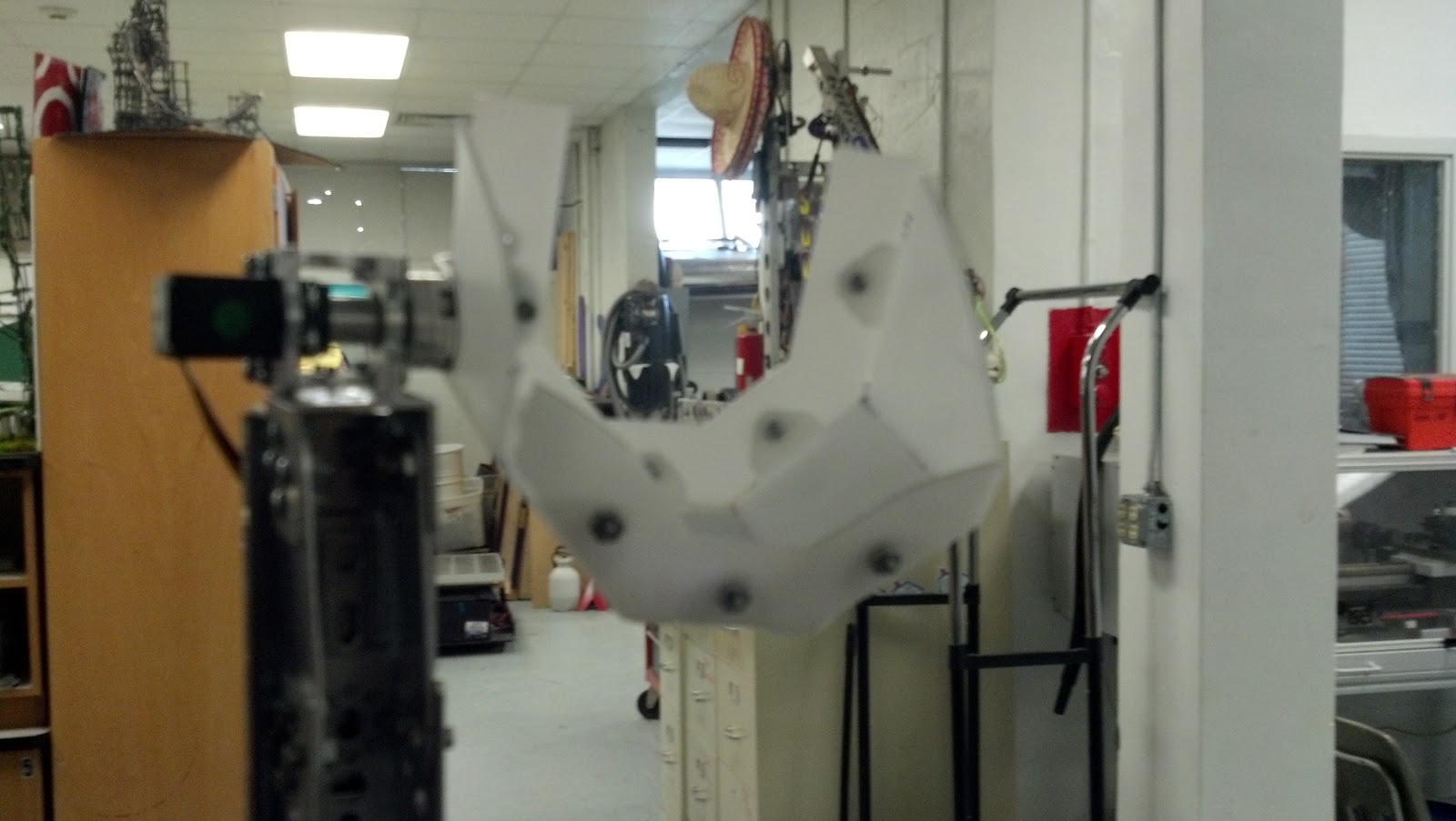
In light of our recent acquisition of sponsors – as well as the need to display our team number – we plan to construct a frame for our robot, where we'll mount two big sheets of plexiglass.
This serves two ever-useful functions: first, it gives us a place to put our sponsor(s) logo(s); second, it gives us a shield to prevent other robots from damaging our robot's insides; third, now we can put Sonic on Sonic.
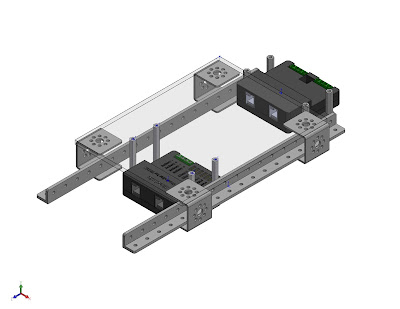
As a side effect, we also now have a place to put the brain and battery where there easily accessible; I took the liberty of drawing that up in SolidWorks too.




12.07.2012
Autonomous Ring
In the interest of speed and efficiency, we decided to create a separate holder for the autonomous ring. This holder allows three things to be accomplished: simpler coding, placement of the ring, and ideal positioning. The slight advantage this gives may not seem like much, but it adds up.

12.06.2012
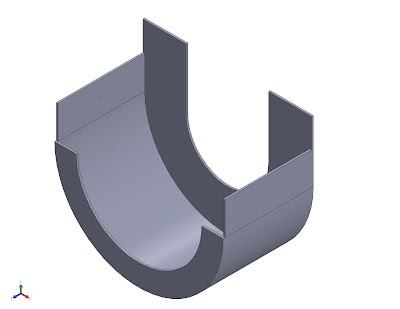
Improving the End Effector

The old end effector design, while good, was not as efficient as we wanted – it worked beautifully, but being the perfectionists that we are, we wanted to do even better. We decided to slightly alter the shape of the end effector, which should allow it to secure the rings even better.

Casey's New Toy
Today, we finally got the shipment of IR Sensors that we'd been waiting for, and the team is rightfully excited. Unfortunately, the only thing standing in the way of Casey and his new toy was the mandatory prototyping we do before sticking it on. So in lieu of being hounded to death by the general populace, I quickly drew us a simple mount for the sensor. It's not pretty, but it gets Casey off my case and onto the computer, so I call that a win!

11.30.2012
The Finger Muncher Mk. II


11.26.2012
Base Instincts
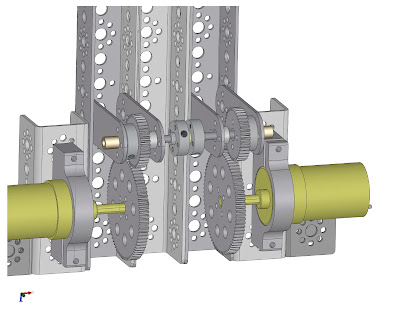
As the channel the motors are mounted on would bend while moving the lift up or down, we attached a second channel next to it that mounts one channel to another, preventing bending or rotation. This makes the motor mounts much stronger and gives the axle less give to slide.

11.21.2012
Coming Together
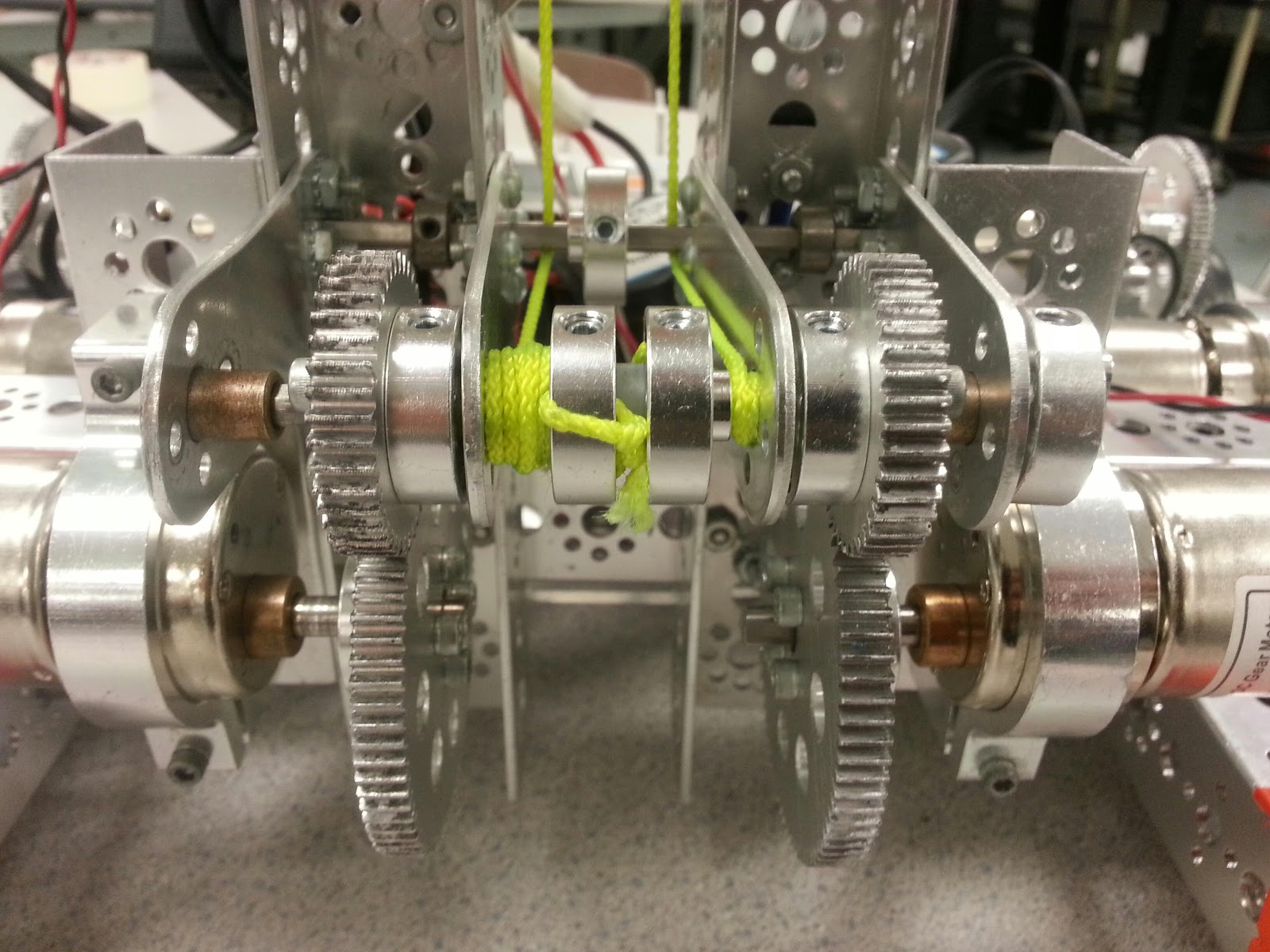
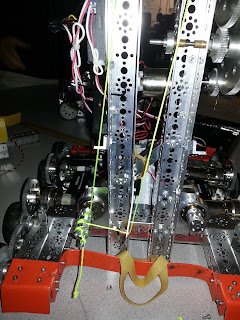
For the first time in a long while, Sonic is once again ready for testing. We fixed the string system for raising and lowering the lift and moved it so it is easily accessible if it needs to be changed or repaired. While practising with the robot, we noticed that the axle holding the strings would slide, allowing the gears to lose contact with each other. By providing more stabilization to the motor mounts and adjusting the axle, we hope to prevent this from occurring.
11.20.2012
String Theory
What is touchy, fragile, and impossible to maintain? Our string spool, apparently. Whenever our robot decides to break its string – which it does more often then we'd like – it becomes a full day's chore to replace it. A few cramped hands later, we decided we needed a new one. So, as usual, it's back to SolidWorks for prototyping. The new one will move the whole spool assembly out to the back of the robot, making it a lot more accessible and – hopefully – easier to repair.

11.19.2012
Repositioning
In a unanimous vote, we have decided that our current placement of the motor controllers is ridiculous and silly; as such, I have endeavored to devise a new, improved strategy for attaching them, involving one plexiglass sheet, some screws and – by popular vote – some velcro. It should do several things: make the wires neater and more accessible provide additional support for the arm, and allow for there to be velcro on the robot. All is right with the world.

Weekend Recon







11.13.2012
One String to Rule Them All
After no school on Monday, we reconvened today to finally finish up our string system, only to instead attempt to use one string for the whole system, creating a whole new set of problems to solve. The strings would slip on the axle, so we had to tie it through the collar in the middle of the axle. After getting everything strung and ready for testing, we found that a single string would spool too much and become tangled, making all our work pointless. Back to our original two string idea...
11.09.2012
In a Bind
Stringing the robot has proved a much more daunting task than previously believed. Travis built a string separator out of plastic and I reconstructed the assembly, only for my knots to come undone. Casey then attempted it a second time with the exact opposite outcome of knotting it too well and rendering it completely immobile. In response I've researched methods of tying knots and have hopefully solved the problem for Monday, as its too late to get anything else done today.
Working for the Weekend
Casey, Travis, and I stayed very late after school today to continue working on the lift system for our robot. The string system Nik worked up earlier became tangled after a couple of uses, rendering it useless. Primarily we need to work on keeping it untangled and making sure it can lift the slide.
Switch 'Em Out
While the old end-effecter was fairly decent, any room for improvement must be seized. We drew up a SolidWorks for a new ring grabber, and it looks promising. Construction starts Monday.

11.08.2012
30 Minutes or Less
The parts that we ordered finally arrived today, greatly increasing the
resources that we have at our disposal and allowing us to build bigger
and better robots. These new parts will be stronger that the parts we
currently are using and will provide us with better performance.

Silly String
Nik and Pierce
troubleshooted our lift system and decided to scrap the string being
wound on the side, as it would not wind correctly and started to destroy
the string. Instead, the string was moved to an axle beneath the arm
that is turned by a gear attached to a motor. This arrangement prevents
the string from stretching when the arm is lowered- another problem we
encountered- and provides more torque for raising the lift, making it a
much better solution.




Feeling Rather Spoolish


11.07.2012
Going Up
I attached the slide to the arm on Monday and today Travis and Casey attached a motor and string to the robot so that the slide would be operational. The decided on attaching the motor near the base of the robot to improve weight distribution and have the string feed through the channels to the slide so it wouldn't get caught or damaged.
Decoding
Casey took the time to fully comment his program for the robot and improve the readability of it thanks to the presentation we viewed last Saturday at St. Thomas. The code will now be much easier to edit by Casey and the rest of the team if we need to make changes to improve performance.
11.05.2012
Chutes and ladders
We acquired a drawer slide for Sonic. We plan to use this slide to reach the third and final level of the rack, thereby completing the arm of our robot. The first major challenge is deciding where to place the slide on the robot, balancing stability and functionality. We decided to initially attach it to the top of the arm and proceed from there, moving the arm if it proves too unstable. In the future we will need to drill additional holes in the slide to attach it firmly, but this arrangement seems promising.
11.03.2012


FTC Engineering Notebook
Cypress Bay High School Did a presentation on the Engineering Notebook and what they did to win the Think award for their notebook from the previous competition. Aspects we learned to add to our notebook are more specific figures about our engineering process and the challenges we face daily.
FTC Programming Workshop
The St. Thomas team presented a power point on the basics of Robot C. They discussed Robot C tools and the programming language, as well as an efficient way to code the robot using comments and functions to clean up and improve the readability.
{kind=link}
{kind=link}
{kind=link}
Proving Grounds
Today is our practise tournament at St. Thomas High School where we can meet other teams and test our robot against theirs in the ring. We can also create friendships and alliances here that will follow us long past this year's FTC challenge, making this a great day for our robot and our team.


11.02.2012
What Really Grinds My Gears...
The arm design we used to reach the second level of the rack had a gear ratio of 25 to 1 in order to provide the power we needed to reach the height with the weight of the grabber. An unfortunate side effect of this gear ratio is the large amounts of stress it puts the parts under. We experienced this first hand when the axle our arm was on was twisted and bent by the force, forcing us to cut it in order to replace it with a new axle that can better handle the stresses.


11.01.2012
Mentorship
Casey went to Western High School to help mentor the rookie team that visited us the other day after school.
10.31.2012
Here It Goes Again
Casey and I stayed afterschool today to practise with the robot and our new arm as we have a practise tournament on Saturday, November 3. This is one of our runs, timed at a two-minute period. After repeated practise we got our best to be 12 rings placed on the middle rack, and developed a strategy to get the most rings in the least amount of time.
Not another brick in the wall
Today, we were visited afterschool by Western High School's FTC rookie team. We showed them our set-up and gave them valuable knowledge about designs and coding. Our team really hit it off with their group and we exchanged contact information in order to provide further assistance to our hopefully future competitors.




Armageddon
The arm is now finished and ready for testing. This arm needs to be able to grab rings from the first level and deposit them onto the second level of the rack, all while maintaining balance and structural integrity. The arm can move up and down and the grabber on the end can rotate, giving us the degrees of movement we need in order to place the rings.




10.30.2012
Growth Spurt
We removed the previously short aluminium channel and replaced it with a longer channel that can reach the middle level of the rack. In order to do this, we had to remove our cross support and brain mount, meaning we'll have to find a new location for them. Additionally, we will have to add an additional motor to the channel that will enable the grabber to rotate to grab and release rings.
Subscribe to:
Posts (Atom)